Interfaces that helps with mutual interaction of human or
autonomous machine system in the virtual, augmented, remote
working environment and the simulator technology that applies it;
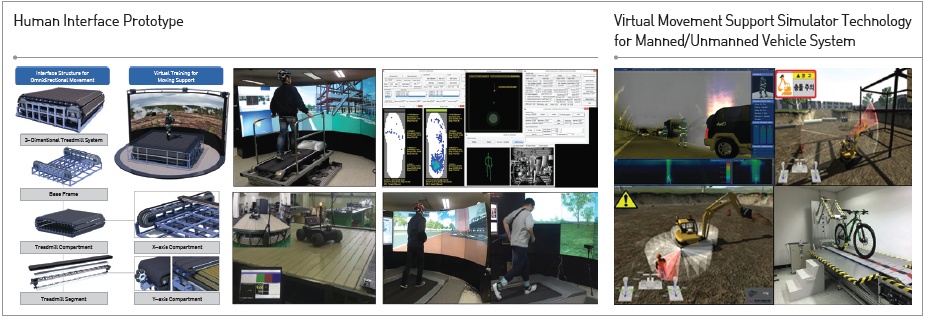
The Technology includes the treadmill platform that provides virtual
walking or driving environment and the motion platform where the
intention of the user is easily input
Client / Market
- Virtual reality and simulation production/solution company
- Health and rehabilitation device manufacturer/solution company
- Sports and entertainment production/solution company
- Car (including autonomous driving) simulator manufacturer
- National defense/public training simulator manufacturer

Necessity of this Technology
- Existing simulator uses an unintuitive interface like a joystick to realize the
movement of the trainee or the driving motion, which feels less engaged with the
virtual reality.
- To verify the operability of increasing autonomy machine system, a virtual reality
technology, that could precisely simulate working scenarios of a system to verify the
mutual interaction with human, needs to be developed.
- In particular, an omnidirectional treadmill mechanism has never been commercialized.
A new affordable mechanism having driving and noise performance at the same time
needs to be developed.
Technical Differentiation
- This technology includes the treadmill and motion plate technology that recognizes
the movement speed intended by the trainee or the driving device to move or control
the virtual reality environment.
- With this technology, a virtual training system can be utilized for operation training
for machines for special works or large machines such as construction machinery
to prevent accidents.
- It is expected to be utilized for various fields in the future including combat
training for national defense, medical rehabilitation treatment, and sports ability
enhancement.
- It uses a low-noise, high-efficiency power transfer driving system for 360-degree
omnidirectional ground motion generation and applies the independent power-train
mechanism for ground without limitations regarding ground shape and material.
- The moving body (trainee) speed prediction-based feed forward control technology
for ground speed control has been verified.
- A low-cost high-precision virtual reality contents control technology using lower
body movement and posture is secured to simplify the system.
Excellence of Technology
- An omnidirectional driving mechanism for highspeed, low-noise ground movement
is under development.
- The feed forward control algorithm based on foot pressure distribution change rate
or movement of center of gravity has been developed.
- A human interface prototype specialized for immersive large-scale virtual reality
environment has been developed.
- Simulator technology for fire training and large machine equipment safety has been
developed.
- Detection and control simulation technology for prior verification of unmanned/
autonomous special working machine for industrial use has been developed.
- Technology for virtual movement simulator for manned/unmanned driving vehicles
has been developed.
- A virtual reality prototype for unmanned vehicle system is under development for
prior operability verification.
CURRENT INTELLECTUAL PROPERTY RIGHT STATUS
PATENT
- Omnidirectional Ground Movement Treadmill Mechanism (KR0061073, KR1740945, KR1672705, KR1672702, KR1679223, KR1740921)
- Omnidirectional Ground Movement Simulator Application Technology (KR0052297, KR0057892, KR0052293)
- Ground Movement Simulation Control Technology (KR1650763, KR0052302)
- Simulator for Driving Performance Assessment of Mobility (KR0011568)
KNOW-HOW
- Driving body-measured data-based virtual reality simulator design technology
- Engineering analysis data-based virtual reality simulator design technology
- Working and driving test system for autonomous machine and its control method
- Autonomous machine system using mixed reality and its control method
|

