Human-centric machine system safety technology for monitoring
surroundings of working machines such as excavator and collision
prevention
Client / Market
- Construction machinery (excavator, forklift, etc.) manufacturer, operator
- Construction/civil engineering business
- Local government for government-ordered construction
Necessity of this Technology
- An ultrasonic, image sensor cannot predict dynamic behaviors.
- Need to determine the safe time for braking considering dynamic properties of the
moving object.
- Active control of emergency stop required, more than a simple alarm
- Can reduce fatal accidents from construction site–high risk group within top 15% of
industrial accident
- Crucial core technology for the future considering the trend for machine safety
regulation and the speed of unmanned technology advancement
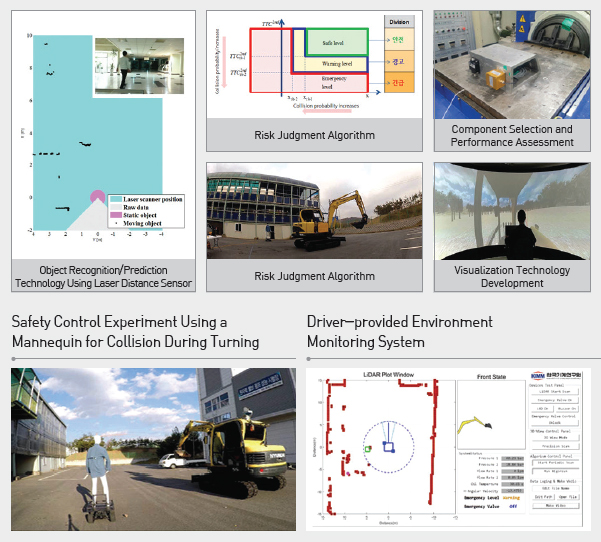
Technical Differentiation
- Developed a LiDAR-based technology with high resolution and precision with
existing image and ultrasonic sensor
- Developed a risk judgment algorithm enhanced from the simple distance-based to
consider time
- Secured consistent safe distance considering the inertia of excavator’s turning
movement
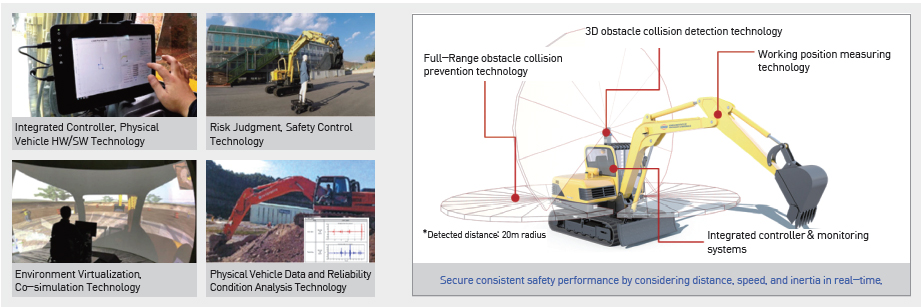
Excellence of Technology
- Full-Range (360 degree) obstacle monitoring technology
- Simultaneous recognition of multiple objects and algorithm computation within
100ms
- 3D obstacle collision monitoring technology
- Consistent safe distance (1 m±0.25 m) considering the inertia of excavator’s turning
movement
- Distance-based and time-based collision risk judgment algorithm technology
- Virtualization technology and reliability assessment technology
CURRENT INTELLECTUAL PROPERTY RIGHT STATUS
KNOW-HOW
- LiDAR data post processing (filtering, clustering, etc.) technology
- Object dynamic movement (speed) prediction technology
- Distance and time-based collision risk assessment
- Collision prevention safety control performance mounting/remodeling technology
for excavator, etc.
- LiDAR-based 3D environment recognition technology
|

