This technology is the world’s first robotic ankle-foot prosthesis
that satisfies 1.4 kg for weight, 150Nm for ankle joint torque, and
30 degrees for ankle joint angle while costing only 1/3 of existing
robotic ankle-foot prosthesis, which allows for securing high
product competitiveness
Client / Market
- Hospital/rehabilitation institute/medical device manufacturer
Necessity of this Technology
- Early commercial prosthetic legs were developed from the aesthetic purposes
to replace the amputated part. Now, prosthetic legs that play a core role from
functional aspects-allowing for natural gait, while avoiding excessive metabolism to
use-are being developed and supplied.
- However, for natural gait, sufficient torque for push-off needs to be generated. Yet
existing prosthetic leg was light but could not generate a great torque or generates
sufficient torque but heavy in weight and has a long length that it could only be used
by a patient who could fit it.
- Therefore, to allow more amputees to use the leg, a lighter, shorter robotic ankle-foot
prosthesis that generates sufficient torques for natural gait needs to be developed.
Technical Differentiation
- Successful development of a robotic ankle-foot prosthesis that fulfills the world’s
top level of weight and ankle movement (1.4 kg, 150 Nm, 30°)
- The weight of adult foot is about 2 kg, but a robotic ankle-foot prosthesis has heavy
components around the ankle due to its structural characteristics, and the user may
feel unnatural, so the main goal was to achieve 1.4 kg for the weight. Advanced global
institutions have failed to meet both the weight and ankle movement requirements.
- Proprio from Össur is light weighted (1.4 kg) but only has ankle angle control
function. BioM from BionX generates enough push-off torque when it kicks the
ground, but the weight is heavier due to additional mechanism (1.8 kg).
Excellence of Technology
- The world’s top-level gait cycle detection rate (90%) was achieved by establishing
a gait analysis device for generating a customized gait model and securing the gait
model generation technology
- Cooperating with a medical institution, an empirical test was conducted with actual
patients, and it was quantitatively verified that the patients were able to walk more
naturally with the newly developed robotic ankle-foot prosthesis.
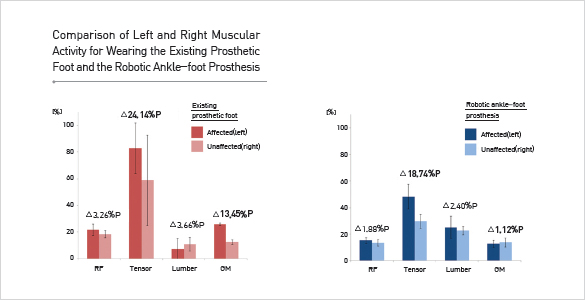
- It was verified that muscular activity from all measured muscles except for lumbar was
reduced while using the robotic ankle-foot prosthesis.
- It seems the active movement of the robotic ankle-foot prosthesis has assisted
movement of affected muscles.
- The difference in the left and right muscular activity in all observed muscles decreased
(5% in average)
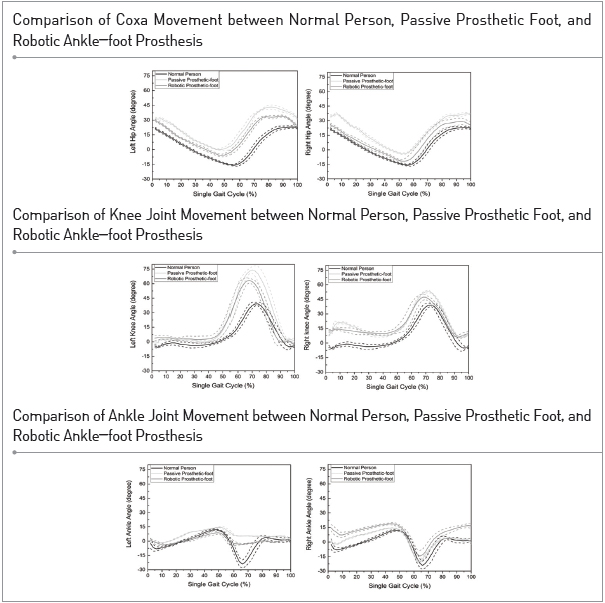
- Comparison of joint angle movement between normal person vs. passive prosthetic
foot vs. robotic ankle-foot prosthesis
- Comparison of the change in the angle of coxa, knee and ankle for one step
- The graphs show the joint movement of affected leg (left) and normal leg (right).
- All joints’ movement became closer to the movement of normal person’s leg when using
a robotic ankle-foot prosthesis.
- For the normal leg, the joint movement became closer to that of a normal person when
a robotic ankle-foot prosthesis was worn on the affected leg.
CURRENT INTELLECTUAL PROPERTY RIGHT STATUS
PATENT
- Joint Driving Module and Compliant Type Robot Artificial Ankle (KR1793141)
KNOW-HOW
- Gait analysis technology using 3D motion capture system
- Gait model generation technology
- Precision motor control technology for gait model realization
- Embedded controller/driver design technology
|

