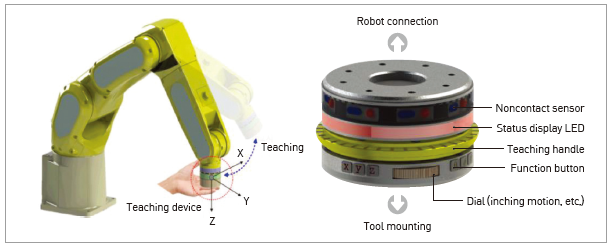
Robot teaching refers to the work of setting or changing of operation sequence, position or velocity of manipulator in industrial robot.
Robot teaching can be largely divided into two methods; one is the method that manipulator is controlled by separate teaching pendant, the other is the method that a user holds the end-effector or a link of manipulator and teaches the waypoint (direct teaching).
Client / Market
- Industrial robot development/manufacturing company
- Robot SI companies
Necessity of this Technology
- The market of human collaborative robot is rapidly growing. Intuitive interface is needed for effective use of collaborative robot
- When using the teaching pendant for robot teaching, robot teaching is difficult and time consuming because deciding the direction of movement of the end effector is not intuitive.
- Direct teaching can only be applied for a robot with the direct teaching function in the robot controller and thus it cannot be applied to general industrial robots. Also, force sensor for detecting the human command at the end effector needs to be added, which increases the cost. With the effect of sensor noise and sensitivity, it is difficult to precisely detect the teaching direction and distance.
Technical Differentiation
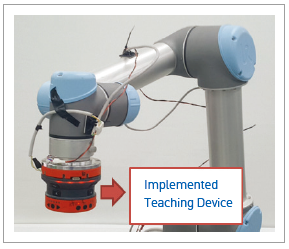
- Improvement of user intuitiveness with the proposed teaching device attached to the end effector of the robot
- Improvement in sensor noise and sensitivity issue by realizing an input unit with a physical interface such as button, dial or jog that the user can operate
- Improvement in teaching accuracy and efficiency
Excellence of Technology
- Improved intuitiveness with a teaching handle that can generate a robot position and rotation motion following the user’s jog motion (movement in X, Y, Z direction, rotation around ΘΧ, ΘΥ, ΘΖ)
- Intuitive teaching with assignment of active button for mode selection and passive button for motion and matching motions
- With the collision prediction system, collision with the worker can be prevented during robot moving after the teaching and the robot secures safe distance from other workers nearby before start working.
- A patent applied for detail mechanism on collision prediction system using human body detecting sensor and distance sensor
- Prototype was implemented and verified as the outcome of the Robot Industry Core Technology Development Project (May 1, 2016 to April 30, 2019)
Current Intellectual Property Right Status
PATENT
- Robot Teaching Device (KR1740898)
KNOW-HOW
- Implementation of teaching command and feedback of robot status through the external interface of robot controller
|

