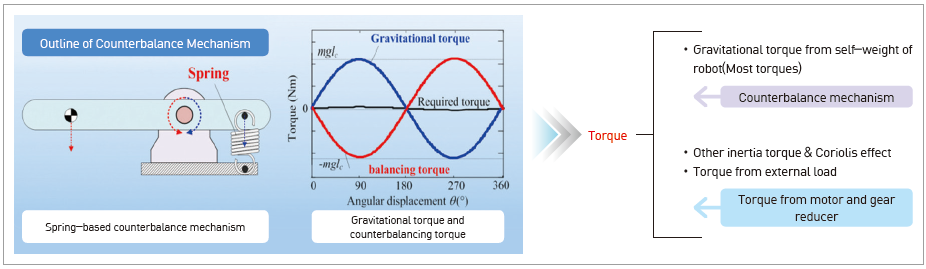
Counterbalance mechanism to minimize required power to operate robot arms and human-friendly manufacturing robot platform with intrinsic safety.
Technology for designing counterbalance robot arm
Client / Market
Necessity of this Technology
- With increasing interest in collaborative robots that work together with human, safety of collaborative robot has become an important issue.
- Existing robot was designed to stop or move in the opposite direction when it detects a collision to reduce collision force, but this is costly, and the sensor may have an error that it cannot be a fundamental solution.
- Also, robots with lower specifications (low-powered robot, low-stiffness robot) are not dangerous but have less precision and degraded performance.
Technical Differentiation
- This robot technology maintains the performance of robot but significantly reduces the actuator mass required for robot movement to secure safety.
- Counterbalance for multi-degree of freedom composed of various types of joints
- Counterbalance mechanism that available for mobile manipulator operated in various topography.
- Counterbalance mechanism
- Minimization of required torque to operate robot arm with counterbalance mechanism.
- Improved intuitiveness with direct teaching that does not require existing force sensor and complex force control algorithm
Excellence of Technology
- Minimization of actuator capacity
- Realize human-friendly collaboration through maximized robot safety
- Energy saving
- Counterbalance mechanism + joint back-drivability → Direct teaching (Does not require expensive F/T sensor, complex force control)
- Counterbalance mechanism applicable for other industrial devices
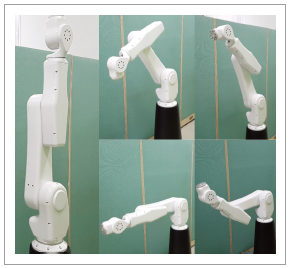
- Performance verifications of prototype completed
Current Intellectual Property Right Status
PATENT
- Variable Multi-DOF Counterbalance Mechanism (KR1801242)
- Variable Counter Balance Mechanism (KR2016-0006402)
- Adjustable Counterbalance Mechanism and Control Method Thereof (KR2016- 0041633)
- Variable Gravitational Torque Compensation Device and Control Method Thereof (PCT/KR2017/002317)
KNOW-HOW
- Realization of self-weight compensation mechanism for complex multi-DOF joint
- Technology for self-weight compensation device design for change in floor angle
- Realization of variable gravitational compensation device with self-weight compensation ability
- Safe direct teaching technology using gravitational compensation device
|

