List of KIMM TechnologiesResearch Institute of AI Robotics

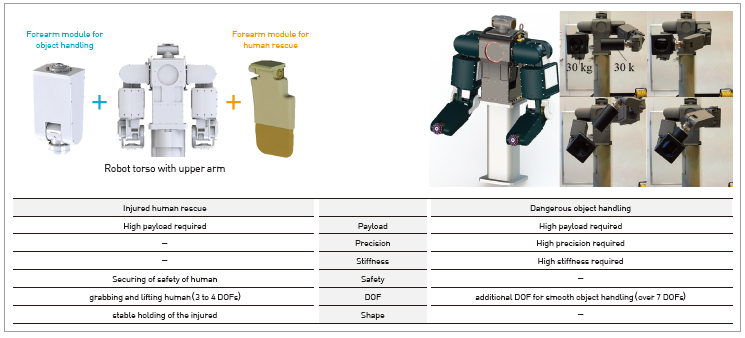
High Payload Dual Arm Robot with Detachable Forearm Module for Performing Multipurpose Duties
| Division | KIMM Institute of AI Robotics > Department of Robotics and Mechatronics |
|---|---|
| Name | Dr. Hwisu Kim, Dr. Chanhoon Park, Dr. Dongil Park |
| Department | Department of Robotics and Mechatronics |
| Tel | +82 - 42 - 868 – 7208 |
| HSKim81@kimm.re.kr, chpark@kimm.re.kr, parkstar@kimm.re.kr | |
| Attachment | Download 048_High_Payload_Dual_Arm_Robot_with_Detachable_Forearm_Module_for_Performing_Multipurpose_Duties.pdf (1.9 KB) |
Payload (approx. 30 kg/arm) robot technology with the best specifications in KoreaRobot with a simply detachable forearm for various use such as dangerous object handling and injured rescue
Client / Market
Necessity of this Technology
Technical Differentiation
Excellence of Technology
Current Intellectual Property Right StatusPATENT
KNOW-HOW
|